Associate Professor Marcus Frean
School of Engineering and Computer Science
Victoria University of Wellington
Victoria University of Wellington
- machine learning
- affinity propagation of opinions for hashmapd?
- finding circles
- Carrying on with the Configuration Variation Eliminatizer!
- generative modeling
- emergent "things" (ie. limited explaining away in rich representations).
- An Idea for an optimization algorithm
- Advances on GPO/ EGO
- GPO for tracking
- hashmapd's labels problem
- tSNE
- STRANDBEEST
- theoretical biology
machine learning
affinity propagation of opinions for hashmapd?
finding circles
This is cooking along nicely, with Chris Hollitt, who knows Hough Transform backwards. A good MSc project, I imagine. Conceivably even a PhD, at a pinch. IF we're confident that the way hasn't been well trodden already.- get it going
- test it to hell
- push the assumptions back, creating better models, EG:
- ellipses
- better background models, like blobs or gradients
- finding multiple overlapping circles
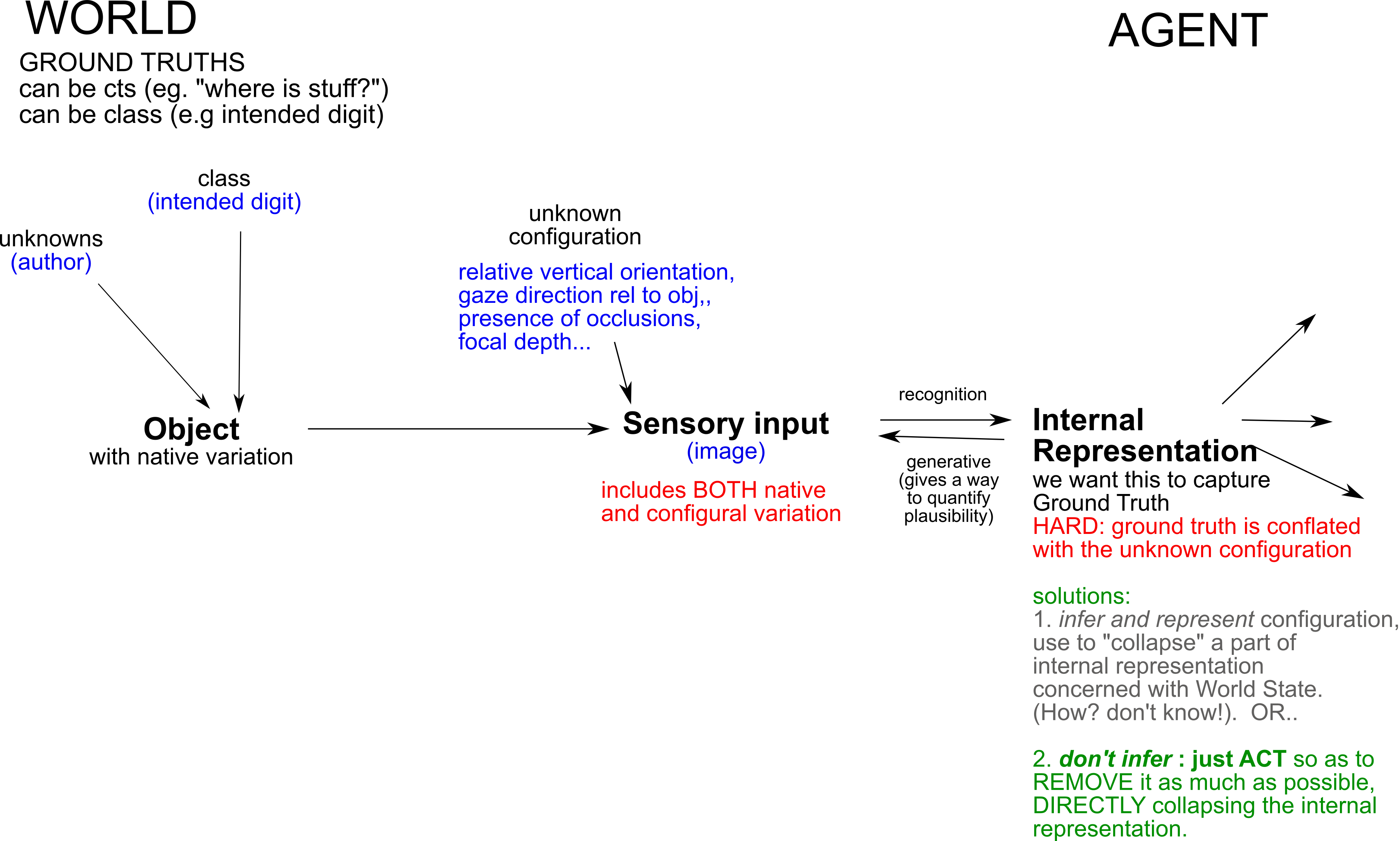
Carrying on with the Configuration Variation Eliminatizer!
James Bebbington's MSc is really cool - so what's next? drawing.png: part of the Big Pic on the Bebbington thesis- implement in a real robot
- other ideas to extend / proof-of-concept it
generative modeling
Oct 2010. I've been thinking about boosting ideas in the context of "constructive RBMs", but this might be more general than that. The essential problem of learning a generative model:- a 'training set' is a list of vertices of a hypercube, and we assume this list is massively shorter than the total number of vertices. Call these the 'data vertices', or just 'v'.
- for simplicity suppose there are no exact replications in the training set
- our model-learning job is to simply to maximize the sum of the log probabilities of the data vertices
- the gradient calculation says: for each data vertex v,
- sample h from P(h|v), giving a x1 = (v1,h1) pair
- take another sample, from just the model joint, giving a x2= (v2,h2)
- steal some probability mass from x2 and give it to x1
emergent "things" (ie. limited explaining away in rich representations).
Deep belief nets are all very fine, but they're based on RBMs, and RBMs, being undirected graphical models, DON'T have a generative model that involves high-level constructs that are independent, a.k.a. "things". Instead, everything in the hidden layer of an RBM is dependent on everything else in the prior (i.e. the generative model), and only becomes independent once you observe the visible units. RBM: learn by truncated Gibbs sampling, in two phases (clamped and unclamped). SBN: learn by EM with Gibbs sampling in the clamped phase only, i.e. from P(h|v). Gibbs sampling in this phase is achieved by almost the same as happens in an RBM (i.e. sigmoid function of input to h from v), but visible units ONLY contribute to the weighted sum when their input from OTHER hiddens is in DISAGREEMENT with their state. (this is an approximation to true Gibbs sampling, treating log(1+exp(z)) as a piece-wise "hinge". This makes intuitive sense: the hidden unit only needs to "try to be a cause" for v when other hidden units fail as explanations (fail to "explain away" this v). The drawbacks of Gibbs sampling in an SBN are:- each unit has to calculate a different number for each of the hiddens it connects to, whereas in an RBM it's just the state v alone.
- this sum involves other hidden units, so they all interact (as they must!! there seems no way they can "explain away" without interacting, afterall). And the practical effect of this is that interaction makes MCMC slow to mix
- Since MCMC is slow to mix, both recognition and learning are going to be slow dynamical processes.
An Idea for an optimization algorithm
- Genetic algorithms aren't ergodic: they don't search the entire space, even given forever.
- Simulated Annealing runs on top of Metropolis, which is MCMC, which is ergodic.
- But Metropolis mixes very slowly. Hybrid/Hamiltonian MC works much better, if you know the gradient.
- Ergo (!), if you know the gradient (as in NN optimizations, say), you'd expect HMC to do better than almost any GA, after accounting for parallelization.
- But what about optimizations without a gradient, ie. the main target of GAs anyway.
- the matrix inversion, to be done with every new sample.
- searching the model for an optimum. Fast-ish with conjugate gradient, but it's messy and big / hard. People naturally prefer the simplicity of GAs.
- use the partitioned inverse equations to add to C^inv (an N-by-N matrix, where N is the number of datapoints).
- use C^inv to estimate the local gradient
- feed that to Hybrid/Hamiltonian MC, which proposes a new sample point.
- http://citeseerx.ist.psu.edu/viewdoc/summary?doi=10.1.1.45.7303
- http://citeseerx.ist.psu.edu/viewdoc/summary?doi=10.1.1.57.1592
- http://citeseerx.ist.psu.edu/viewdoc/summary?doi=10.1.1.29.3674
- http://citeseerx.ist.psu.edu/viewdoc/summary?doi=10.1.1.31.3361
Advances on GPO/ EGO
joining the dots
Notice that- The very final "sample point" (x) returned to the user should be the point with highest mean prediction, perhaps with some penalty for variance (ie. risk aversion) thrown in. If the penalty is high, we'll return the highest point actually found. PURE EXPLOIT
- the penultimate point should be that with maximum expected improvement. And we know that's basically breaking into two bits, a mean lover and a variance lover (at high mean), added together. EXPLOIT + EXPLORE
- the main argument / interest then is what to do for the samples before this.
- in the limit that you're taking early samples and expect to be able to take ZILLIONS MORE, I guess the best thing to do is to be a variance-lover, and ignore the mean. PURE EXPLORE
non-homogeneous noise distribution?
Also:.... I don't think we've yet coped with truly noisy samples right, in the sense that I misunderstood "variance" all along...! The GP doesn't seem to tell you the variance of the samples - it's (just) the variance of the MEAN. Not the same! But Variance of actually sampling process IS important! This seems to never have been addressed.superpositions of covariance functions
real data often looks like a sum of at least two GPs. How does that affect inference and learning? Can this improve GPO further?use the variance of EI
There is a posterior distribution over "improvement" that is Gaussian. So far, we've used the expected (mean...) improvement, but haven't thought about the uncertainty in this - the variation in the improvement we expect. Given two input vectors with the same EI, but with different "variances" on the improvement (a definition of this would help, for starters!), I bet you'd prefer one over the other. And perhaps which it is would depend on how many MORE points you expect to be able to sample. I feel in my bones that there's a connection between this and the "future aware" notion.GPO for tracking
Is this a possible completely new way to do "particle" methods (PF, PSO), for tracking? Think this through... Sim, seems like it might be a good fit for Wireless sensor networks optimization problems. Seriously...hashmapd's labels problem
problem here is we want the answer yesterday... But it's full of interesting theory: surely there are multiple possible approaches. Would we need to embargo / protect the results? Yes, probably. Think about this, talk over with Miles and Ed.tSNE
A good MSc project: try out tSNE "annealing" from high dimensions down to 2 (or 1): can it help avoid local optima in the resulting mapping?- find two good problem sets
- find a regime where tSNE vanilla is getting stuck all the time
- fix the stuck-ness by the extra-dimensional bypass!
 Users/Marcus
Users/Marcus
{kind=link}